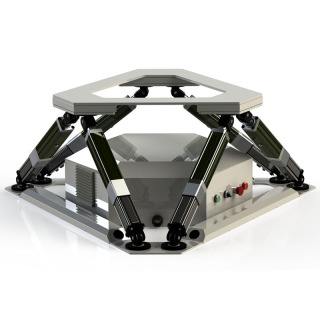
Gemi simülatörü hareket üssü
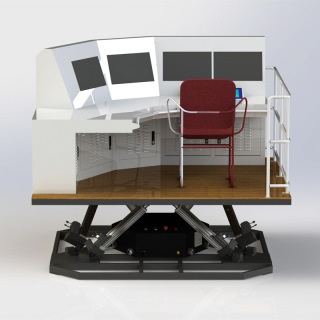
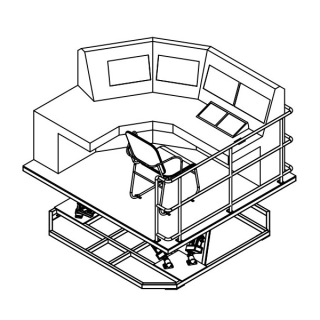
6-DOF hareket platformu ile donatılmış navigasyon simülatörü ürünü, mürettebat eğitimi, pilot eğitimi, VTS operatör eğitimi, GMDSS telsiz operatörü eğitimi ve diğer özel iş eğitimi (römorkör operasyonu, balıkçılık operasyonu, buzda navigasyon) gibi çeşitli iş eğitimi ihtiyaçlarını karşılayabilir. alan, iç seyrüsefer, yat operasyonu, petrol sızıntısı acil durumu, arama ve kurtarma) ve liman ve navigasyon mühendisliği gösterimi, akıllı deniz ekipmanı doğrulaması vb. gibi bilimsel araştırmalar için de kullanılabilir.
Altı serbestlik dereceli hareket platformu, operasyon sürecinde geminin hareket tutumunu simüle edebilir, gemi ekipmanının testini gerçekleştirebilir, kullanıcılara eksiksiz deniz durumu test verileri sağlayabilir ve tamamlamak için kullanıcılara yardımcı olabilir ve onlarla işbirliği yapabilir. gemi ekipmanının test deneyi; Gemi sürüş ortamını ve hareket duruşunu simüle etmek için kullanıcı gereksinimlerine ve sanal ekipmana göre sürüş eğitimi ekipmanı sağlayabilir. Size ürün özelleştirme, özelleştirilmiş dalga spektrumu giriş arayüzü sağlayabilir, kullanıcının deniz koşulları için gereksinimlerini karşılayabilir ve sahneyi ve ortamı yüksek oranda eski haline getirmek için VR teknolojisini birleştirebiliriz.

Ana Özellikler:
Sistem performansı
| Duruş | Birim | Genlik | Hız |
| kaldır | mm | ±200 | 250 mm/sn |
| Kabarmak | mm | ±200 | 250 mm/sn |
| Sallanmak | mm | ±200 | 250 mm/sn |
| Saha | ° | ±25 | 25°/S |
| Rulo | ° | ±25 | 25°/S |
| sapma | ° | ±25 | 25°/S |
Yük özelliği
| Ürün ağırlığı | 330 kilo |
| yük | 500 kilo |
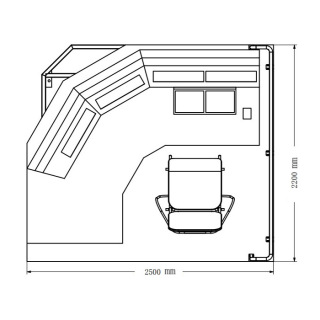
Ürün Boyutları
| Uzunluk | 2500 mm |
| Genişlik | 2200 mm |
| Minimum Yükseklik | 820 mm |
Güç Gereksinimleri
| Güç kaynağı | 380V üç fazlı |
| Bağlantı | Ethernet |
Kontrol sistemi (Elektrik kabini)

Kontrol sistemi: gömülü kontrol yazılımı ana kontrolör üzerinde çalışır ve hareket kontrolörü, Gugao yüksek performanslı otobüs hareket kontrol cihazını kullanır ve altı derecelik hareket kontrolünü gerçekleştirmek için şirketimiz tarafından bağımsız olarak geliştirilen ileri ve ters kinematik algoritmasını kullanır. -özgürlük hareket platformu.
Kontrol yazılımı aşağıdaki işlevsel modülleri içerir ancak bunlarla sınırlı değildir: sistem kendi kendini denetleme işlev modülü, ağ bağlantısı işlev modülü, parametre yapılandırma işlev modülü, durum makinesi işlev modülü, veri ön işleme işlev modülü, yörünge planlama işlev modülü, kinematik hesaplama işlev modülü , veri yolu iletişim işlev modülü, dijital G/Ç işlev modülü, durum geri besleme işlev modülü, arıza alarmı işlev modülü ve güvenlik işlev modülü.
Kontrol yazılımı, ikincil geliştirme arabirimini sağlar ve A Tarafına iletişim arabirimini ve protokolünü açar. Altı serbestlik dereceli platform sorunsuz, sorunsuz ve tökezlemeden çalışır. İleri ve ters kinematik algoritmaları, platformun tutumunu veya elektrikli silindirin konum verilerini gerçek zamanlı olarak geri besler. Algoritma, kullanıcı yanlışlıkla verileri girerse platforma zarar vermeyecek olan platform için dahili güvenlik koruma işlevine sahiptir!