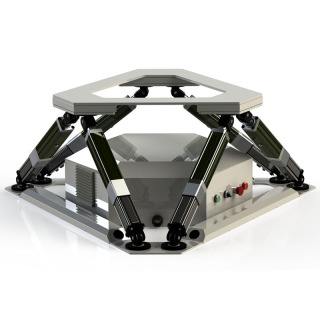
Otomobil sürüş simülatörü hareket tabanı
Hareket üsleri, uçuş simülatörleri, gemi simülatörleri, deniz helikopteri kalkış ve iniş simülasyon platformları, tank simülatörleri, araba sürme simülatörleri, tren sürme simülatörleri, deprem simülatörleri, dinamik filmler, eğlence ekipmanları ve diğer alanlar gibi çeşitli eğitim simülatörlerinde yaygın olarak kullanılmaktadır. ve hatta uzay uzay aracının yanaşmasında ve hava tankerlerinin yanaşmasında yakıt ikmali; Kültürel eğlence ekipmanı, yeni etkileşimli eğlence deneyimi ekipmanı, mühendislik simülasyonu, tasarım değerlendirmesi, test, deney, görev eğitimi, eğitim değerlendirmesi, çevresel simülasyon, olay tekrarı vb.
Ana Özellikler:
Sistem performansı
Duruş Birim Genlik Hız kaldır mm ±160 375 mm/sn Kabarmak mm ±160 375 mm/sn Sallanmak mm ±160 375 mm/sn Saha ° ±16 15°/S Rulo ° ±16 15°/S sapma ° ±16 15°/S
Yük özelliği
| Ürün ağırlığı | 349 kilo |
| yük | 1000 kilo |
Ürün Boyutları
| Uzunluk | 2000 mm |
| Genişlik | 1515 mm |
| Minimum Yükseklik | 780 mm |
Güç Gereksinimleri
| Güç kaynağı | 380V üç fazlı |
| Bağlantı | Ethernet |
Kontrol sistemi (Elektrik kabini)

Kontrol sistemi: gömülü kontrol yazılımı ana kontrolör üzerinde çalışır ve hareket kontrolörü, Gugao yüksek performanslı otobüs hareket kontrol cihazını kullanır ve altı derecelik hareket kontrolünü gerçekleştirmek için şirketimiz tarafından bağımsız olarak geliştirilen ileri ve ters kinematik algoritmasını kullanır. -özgürlük hareket platformu.
Kontrol yazılımı aşağıdaki işlevsel modülleri içerir ancak bunlarla sınırlı değildir: sistem kendi kendini denetleme işlev modülü, ağ bağlantısı işlev modülü, parametre yapılandırma işlev modülü, durum makinesi işlev modülü, veri ön işleme işlev modülü, yörünge planlama işlev modülü, kinematik hesaplama işlev modülü , veri yolu iletişim işlev modülü, dijital G/Ç işlev modülü, durum geri besleme işlev modülü, arıza alarmı işlev modülü ve güvenlik işlev modülü.
Kontrol yazılımı, ikincil geliştirme arabirimini sağlar ve A Tarafına iletişim arabirimini ve protokolünü açar. Altı serbestlik dereceli platform sorunsuz, sorunsuz ve tökezlemeden çalışır. İleri ve ters kinematik algoritmaları, platformun tutumunu veya elektrikli silindirin konum verilerini gerçek zamanlı olarak geri besler. Algoritma, kullanıcı yanlışlıkla verileri girerse platforma zarar vermeyecek olan platform için dahili güvenlik koruma işlevine sahiptir!